Tutorial 13 : Normal Mapping
- Текстури нормалей
- Tangent and Bitangent
- Підготовка нашого VBO
- Шейдери
- Результати
- Йдемо далі
- Вправи
- Інструменти та посилання
- Посилання
Ласкаво просимо до нашого 13 туторіла! Сьогодні ми дізнаємося про роботу з нормалями «normal mapping»
З часів Туторіалу 8 : базове затінення, отримати гарне затінення, використовуючи нормалі трикутників. До цих пір у нас була одна нормаль на вершину - в середині трикутника вона плавно змінювалась, а ось з кольором все по іншому - там є текстури. Базова ідея відображення нормалей (normal mapping) полягає в наданні нормалям такої же гнучкості.
Текстури нормалей
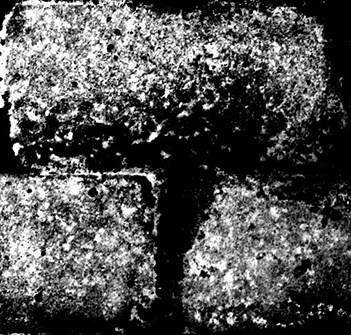
“Текстура нормалей” зазвичай виглядає десь так:
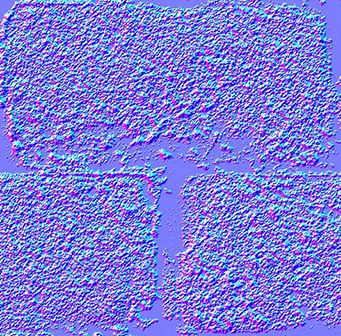
В кожному RGB текселі закодовано XYZ вектор: кожна кольорова компонента знаходиться в діапазоні 0..1 і кожний компонент вектора в діапазоні -1..1, отже це просте відображення з текселів в нормалі:
normal = (2*color)-1 // для кожного компонента
Ці текстури в основному сині, тому що в основному нормалі направлені “з поверхні”. Зазвичай, X координата вказує вправо на площині, Y - вгору (в контексті зображення текстури), отже за правилом правої руки, Z направлено назовні площини текстури.
Ця текстура використовується точнісінько так само, як і дифузна. Та проблема полягає в тому, як конвертувати наші нормалі, які виражені в просторі кожного індивідуального трикутника (дотичний (tangent) простір, також “простір зображення”), в простір моделі (так як він використовується в нашому рівнянні затінення).
Tangent and Bitangent
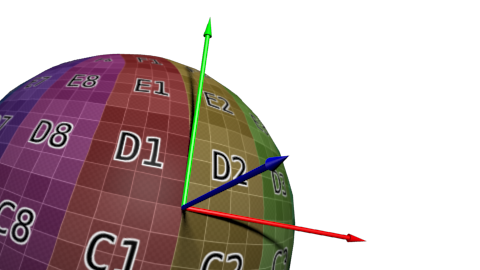
Тепер Ви достатньо знайомі з матрицями, тому Ви знаєте, що щоби визначити простір (в нашому випадку, дотичний простір), нам потрібно 3 вектори. Ми вже маємо наш “вгору” вектор - це нормаль, яку нам надає Blender чи розраховується на основі трикутника просто векторним добутком. Цей вектор представлений синім кольором, таким, який в середньому колір на карті нормалей :
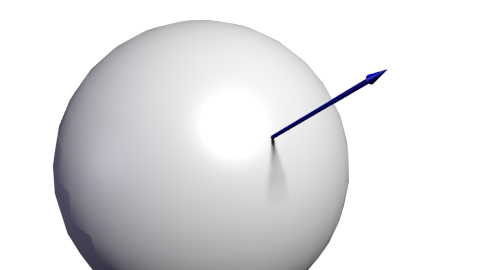
Також нам потрібна дотична, T - вектор, який паралельний поверхні. Але є багато таких векторів :
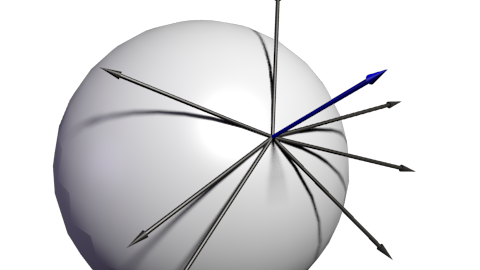
Який з них нам потрібно використовувати? В теорії, будь-який, але нам потрібно, щоб він був узгоджений з сусідніми, що б уникнути потворних країв. Стандартний спосіб полягає в тому, що б орієнтувати так само, як і текстурні координати:
Так як нам потрібно 3 вектори, що б визначити базис, нам потрібно розрахувати «бідотичний вектор» B (який насправді може бути будь-яким із дотичних векторів, але математика стає простою, коли все перпендикулярне) :
Ось алгоритм: якщо ми позначимо через deltaPos1 та deltaPos2 два ребра нашого трикутника, а також deltaUV1 та deltaUV2 відповідні різниці в UV, то ми можемо виразити нашу проблему наступним рівнянням:
deltaPos1 = deltaUV1.x * T + deltaUV1.y * B
deltaPos2 = deltaUV2.x * T + deltaUV2.y * B
Потрібно просто розв’язати це рівняння відносно T і B і у Вас будуть Ваші вектора! (дивіться код нижче)
Як тільки ми маємо вектора T, B, N, ми також маємо цю гарну матрицю яка дозволяє нам перейти від дотичного простору в простір моделі:
За допомогою цієї TBN матриці ми можемо трансформувати нормалі (які отримали з текстури) в простір моделі. Та зазвичай це робиться навпаки - трансформуємо все з простору моделі в дотичний простір і зберігаємо отримані нормалі такими, як вони є. Всі обчислення робляться в дотичному просторі, що нічого не змінює.
«Це зворотня трансформація, ми просто беремо інвертовану матрицю, яка в даному випадку (ортогональна матриця, тобто кожний вектор є перпендикулярний до інших. Дивіться розділ “йдемо далі” нижче) є просто транспонованою матрицею, що значно спрощує наші розрахунки:»
invTBN = transpose(TBN)
, тобто :
![]()
Підготовка нашого VBO
Розрахунок дотичної і бідотичної
Оскільки нам потрібні дотичні і бідотичні поверх наших нормалей, ми розрахуємо їх для всього меша. Ми зробимо це в окремій функції:
void computeTangentBasis(
// вхідні
std::vector<glm::vec3> & vertices,
std::vector<glm::vec2> & uvs,
std::vector<glm::vec3> & normals,
// вихідні
std::vector<glm::vec3> & tangent,
std::vector<glm::vec3> & bitangent
){
для кожного трикутника ми розраховуємо ребро (deltaPos) та deltaUV
for ( int i=0; i<vertices.size(); i+=3){
// скорочення для вершин
glm::vec3 & v0 = vertices[i+0];
glm::vec3 & v1 = vertices[i+1];
glm::vec3 & v2 = vertices[i+2];
// скорочення для UVs
glm::vec2 & uv0 = uvs[i+0];
glm::vec2 & uv1 = uvs[i+1];
glm::vec2 & uv2 = uvs[i+2];
// ребра трикутника : position delta
glm::vec3 deltaPos1 = v1-v0;
glm::vec3 deltaPos2 = v2-v0;
// дельта UV
glm::vec2 deltaUV1 = uv1-uv0;
glm::vec2 deltaUV2 = uv2-uv0;
Тепер ми можемо використовувати нашу формулу для обчислення дотичної та бідотичної:
float r = 1.0f / (deltaUV1.x * deltaUV2.y - deltaUV1.y * deltaUV2.x);
glm::vec3 tangent = (deltaPos1 * deltaUV2.y - deltaPos2 * deltaUV1.y)*r;
glm::vec3 bitangent = (deltaPos2 * deltaUV1.x - deltaPos1 * deltaUV2.x)*r;
В кінці кінців ми заповнюємо tangents та bitangents буфери. Пам’ятайте, ці буфери ще не індексовані, тому кожна вершина має свою копію.
// Виставимо однакову дотичну для всіх трьох вершин цього трикутника.
// вони будуть об'єднанні пізніше, в vboindexer.cpp
tangents.push_back(tangent);
tangents.push_back(tangent);
tangents.push_back(tangent);
// те саме для бідотичних данних
bitangents.push_back(bitangent);
bitangents.push_back(bitangent);
bitangents.push_back(bitangent);
}
Індексування
Індексування нашого VBO дуже подібне до того, що ми робили раніше, але є невеличка різниця.
Якщо ми знайшли подібні вершини (та сама позиція, та сама нормаль, та сама текстурна координата), ми не хочемо використовувати його дотичну і бідотичну, ми будемо знаходить середнє. Отже трішки модифікуємо наш старий код:
// Спробуємо знайти подібну вершину в out_XXXX
unsigned int index;
bool found = getSimilarVertexIndex(in_vertices[i], in_uvs[i], in_normals[i], out_vertices, out_uvs, out_normals, index);
if ( found ){ // Подібна вершина вже є в VBO, використовуємо !
out_indices.push_back( index );
// знаходимо середнє для дотичної і бідотичної
out_tangents[index] += in_tangents[i];
out_bitangents[index] += in_bitangents[i];
}else{ // Якщо нічого не знайшли.
// працюємо як зазвичай
[...]
}
Як бачите, ми нічого не нормалізуємо тут. Це достатньо зручно, тому що таким чином, маленькі трикутники, які мають маленькі дотичні і бідотичні вектори, буде мати слабкий ефект на результуючий вектор ніж великий трикутник (який внесе більше в результат).
Шейдери
Additional buffers & uniforms
Ми маємо два нових буфера - один для дотичних і один для бідотичних:
GLuint tangentbuffer;
glGenBuffers(1, &tangentbuffer);
glBindBuffer(GL_ARRAY_BUFFER, tangentbuffer);
glBufferData(GL_ARRAY_BUFFER, indexed_tangents.size() * sizeof(glm::vec3), &indexed_tangents[0], GL_STATIC_DRAW);
GLuint bitangentbuffer;
glGenBuffers(1, &bitangentbuffer);
glBindBuffer(GL_ARRAY_BUFFER, bitangentbuffer);
glBufferData(GL_ARRAY_BUFFER, indexed_bitangents.size() * sizeof(glm::vec3), &indexed_bitangents[0], GL_STATIC_DRAW);
Нам також потрібна нова uniform зміна для нових нормалей текстури:
[...]
GLuint NormalTexture = loadTGA_glfw("normal.tga");
[...]
GLuint NormalTextureID = glGetUniformLocation(programID, "NormalTextureSampler");
«І одна для 3х3 матриці виду моделі. Строго говорячи це не є необхідним, але це просто - більше про це пізніше. Нам просто потрібна 3х3 верхня ліва частина тому що ми будемо множити напрямки, отже ми можемо викинути частину трансляції (перенесення).»
GLuint ModelView3x3MatrixID = glGetUniformLocation(programID, "MV3x3");
І повний код, що малює зображення буде наступним:
// Очистимо екран
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
// Наші шейдери
glUseProgram(programID);
// Розрахуємо MVP матрицю з клавіатури і матриці
computeMatricesFromInputs();
glm::mat4 ProjectionMatrix = getProjectionMatrix();
glm::mat4 ViewMatrix = getViewMatrix();
glm::mat4 ModelMatrix = glm::mat4(1.0);
glm::mat4 ModelViewMatrix = ViewMatrix * ModelMatrix;
glm::mat3 ModelView3x3Matrix = glm::mat3(ModelViewMatrix); // Візьмемо ліву верхню частинку матриці ModelViewMatrix
glm::mat4 MVP = ProjectionMatrix * ViewMatrix * ModelMatrix;
// Відправимо нашу матрицю до поточного шейдера,
// через змінну "MVP"
glUniformMatrix4fv(MatrixID, 1, GL_FALSE, &MVP[0][0]);
glUniformMatrix4fv(ModelMatrixID, 1, GL_FALSE, &ModelMatrix[0][0]);
glUniformMatrix4fv(ViewMatrixID, 1, GL_FALSE, &ViewMatrix[0][0]);
glUniformMatrix4fv(ViewMatrixID, 1, GL_FALSE, &ViewMatrix[0][0]);
glUniformMatrix3fv(ModelView3x3MatrixID, 1, GL_FALSE, &ModelView3x3Matrix[0][0]);
glm::vec3 lightPos = glm::vec3(0,0,4);
glUniform3f(LightID, lightPos.x, lightPos.y, lightPos.z);
// Прив'яжемо нашу дифузну текстуру в текстурний юніт 0
glActiveTexture(GL_TEXTURE0);
glBindTexture(GL_TEXTURE_2D, DiffuseTexture);
// Set our "DiffuseTextureSampler" sampler to user Texture Unit 0
glUniform1i(DiffuseTextureID, 0);
// Прив'яжемо нашу текстуру з нормалями в текстурний юніт 1
glActiveTexture(GL_TEXTURE1);
glBindTexture(GL_TEXTURE_2D, NormalTexture);
// Set our "Normal TextureSampler" sampler to user Texture Unit 0
glUniform1i(NormalTextureID, 1);
// перший атрибут в буфері: вершини
glEnableVertexAttribArray(0);
glBindBuffer(GL_ARRAY_BUFFER, vertexbuffer);
glVertexAttribPointer(
0, // атрибут
3, // розмір
GL_FLOAT, // тип
GL_FALSE, // нормалізовано?
0, // крок
(void*)0 // зміщення початку в буфері
);
// другий атрибут в буфері : UVs
glEnableVertexAttribArray(1);
glBindBuffer(GL_ARRAY_BUFFER, uvbuffer);
glVertexAttribPointer(
1, // атрибут
2, // розмір
GL_FLOAT, // тип
GL_FALSE, // нормалізовано?
0, // крок
(void*)0 // зміщення початку в буфері
);
// 3 атрибут в буфері : нормалі
glEnableVertexAttribArray(2);
glBindBuffer(GL_ARRAY_BUFFER, normalbuffer);
glVertexAttribPointer(
2, // атрибут
3, // розмір
GL_FLOAT, // тип
GL_FALSE, // нормалізовано?
0, // крок
(void*)0 // зміщення початку в буфері
);
// 4 атрибут в буфері: дотична
glEnableVertexAttribArray(3);
glBindBuffer(GL_ARRAY_BUFFER, tangentbuffer);
glVertexAttribPointer(
3, // атрибут
3, // розмір
GL_FLOAT, // тип
GL_FALSE, // нормалізовано?
0, // крок
(void*)0 // зміщення початку в буфері
);
// 5 атрибут в буфері: бідотична
glEnableVertexAttribArray(4);
glBindBuffer(GL_ARRAY_BUFFER, bitangentbuffer);
glVertexAttribPointer(
4, // атрибут
3, // розмір
GL_FLOAT, // тип
GL_FALSE, // нормалізовано?
0, // крок
(void*)0 // зміщення початку в буфері
);
// Індексний буфер
glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, elementbuffer);
// Намалюємо трикутники !
glDrawElements(
GL_TRIANGLES, // режим
indices.size(), // кількість
GL_UNSIGNED_INT, // тип
(void*)0 // зміщення початку в буфері
);
glDisableVertexAttribArray(0);
glDisableVertexAttribArray(1);
glDisableVertexAttribArray(2);
glDisableVertexAttribArray(3);
glDisableVertexAttribArray(4);
// обміняємо буфери
glfwSwapBuffers();
Вершинний шейдер
Як було сказано раніше, ми робили все в просторі камери, тому що так простіше отримати позицію фрагмента в цьому просторі. Ось чому ми множимо наші T,B,N вектори на матрицю вида моделі.
vertexNormal_cameraspace = MV3x3 * normalize(vertexNormal_modelspace);
vertexTangent_cameraspace = MV3x3 * normalize(vertexTangent_modelspace);
vertexBitangent_cameraspace = MV3x3 * normalize(vertexBitangent_modelspace);
Ці три вектора визначають матрицю TBN, яка конструюється наступним чином:
mat3 TBN = transpose(mat3(
vertexTangent_cameraspace,
vertexBitangent_cameraspace,
vertexNormal_cameraspace
)); // Ви можете використовувати векторний добуток замість побудови цієї матриці та транспонування. Дивіться Посилання для деталей.
Ця матриця йде від простору камери до дотичного простору (Подібна матриця, але з XXX_modelspace, буде від моделі в дотичний простір). Ми можемо використати її для розрахунку напрямку світла та напрямку очей в дотичному просторі:
LightDirection_tangentspace = TBN * LightDirection_cameraspace;
EyeDirection_tangentspace = TBN * EyeDirection_cameraspace;
Фрагментний шейдер
Наші нормалі в дотичному просторі дуже легко отримати - це є наша текстура:
// Локальна нормаль, в дотичному просторі
vec3 TextureNormal_tangentspace = normalize(texture( NormalTextureSampler, UV ).rgb*2.0 - 1.0);
Отже, тепер у нас є все, що нам потрібно. Дифузне світло використовує clamp( dot( n,l ), 0,1 ), з n та l, які виражені в дотичному просторі (не має значення, в якому просторі ви зробите Ваші векторні та скалярні добутки, головне, щоб n та l були в одному просторі ). Дзеркальне освітлення використовує clamp( dot( E,R ), 0,1 ) з E та R, які виражені в дотичному просторі. Так!
Результати
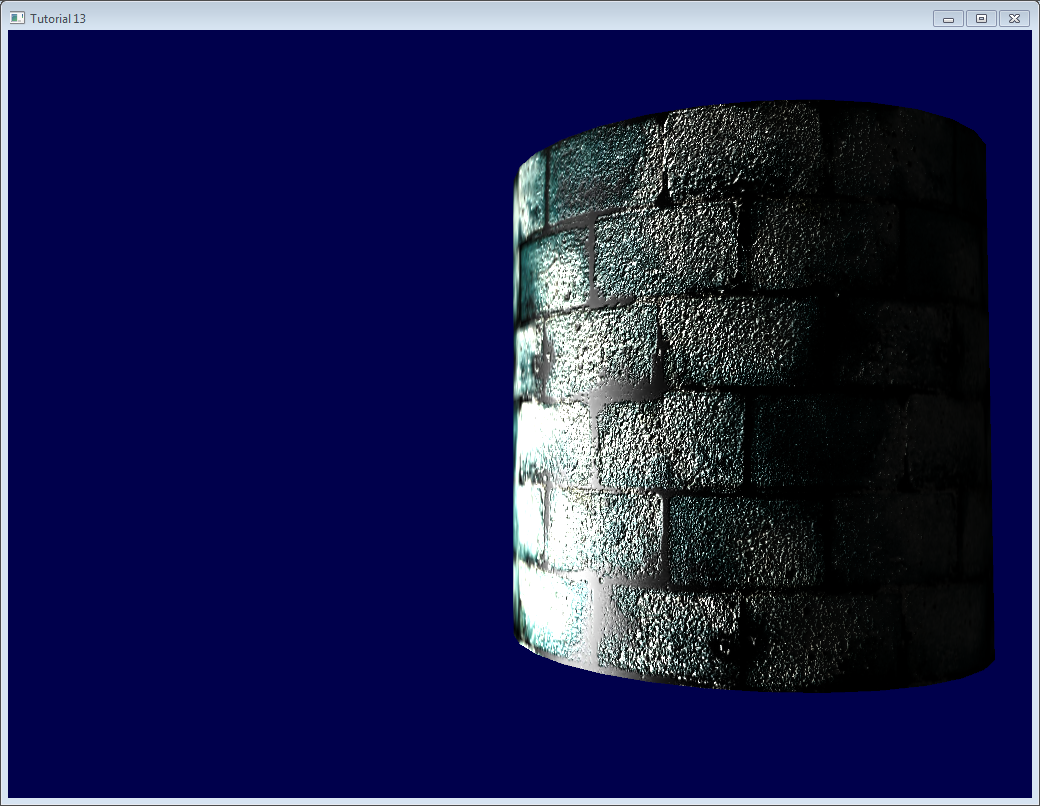
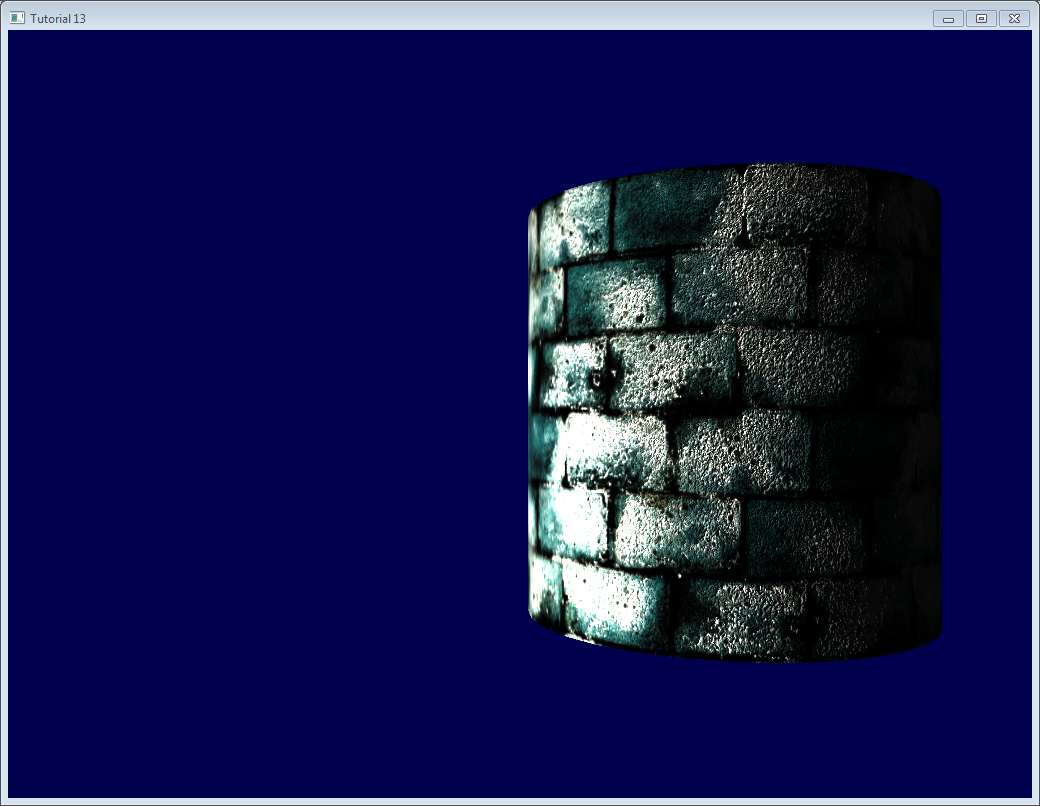
Ось наш результат. Ви можете помітити, що:
- Цеглини виглядають горбиками, тому що ми маємо багато різних нормалей
- Цемент виглядає плоским, тому що текстура в основаному синя
Йдемо далі
Ортогоналізація
В нашому вершинному шейдері ми транспонуємо, а не робимо інверсію, тому, що це швидше. Але це працює тільки якщо простір, який представлений матрицею є ортогональним, чого ще немає. На щастя, це дуже легко виправити - ми просто робимо дотичну перпендикулярну до нормалі в кінці computeTangentBasis():
t = glm::normalize(t - n * glm::dot(n, t));
Ця формула може бути складною для розуміння, ця маленька схема може допомогти:
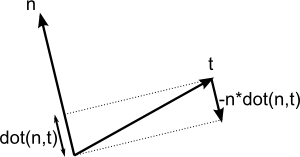
n та t майже перпендикулярні, отже ми можемо “проштовхнути” t в напрямку -n помноженному на dot(n,t)
Ось’ маленький аплет, який це також пояснює (Використовується тільки два вектори).
«Handedness» “Правша-лівша”
Зазвичай Вам не потрібно турбуватись про це, але в деяких випадках, коли Ви використовуєте симетричні моделі, UV орієнтовано в невірному напрямку і Ваш T має невірну орієнтацію.
Перевірка необхідності інвертування дуже проста: TBN має бути в правій системі координат, тобто cross(n,t) має мати ту саму орієнтацію, що і b.
Мовою математики - “вектор A має ту саму орієнтацію, що і вектор B” значить, что dot(A,B)>0, отже нам потрібно перевірити dot(cross(n,t), b) > 0
Якщо це не так, просто інвертуйте t:
if (glm::dot(glm::cross(n, t), b) < 0.0f){
t = t * -1.0f;
}
Це також робиться для кожної вершини в кінці computeTangentBasis().
Дзеркальна текстура
Для задоволення, я просто додав дзеркальну текстуру в код. Це виглядає так:
і використав це замість простого сірого vec3(0.3,0.3,0.3), що використовувалось як дзеркальний колір.
Зверніть увагу, що зараз цемент завжди чорний - текстура говорить, що він не має дзеркальної компоненти.
Налагодження за допомогою immediate (безпосереднього) режиму
Реальна ціль цього вебсайту в тому, що би Ви НЕ ВИКОРИСТОВУВАЛИ режим immediate (безпосередній), який є застарілим, повільним та проблематичним з багатьох причин.
Проте цей режим іноді дуже зручний для налагодження:
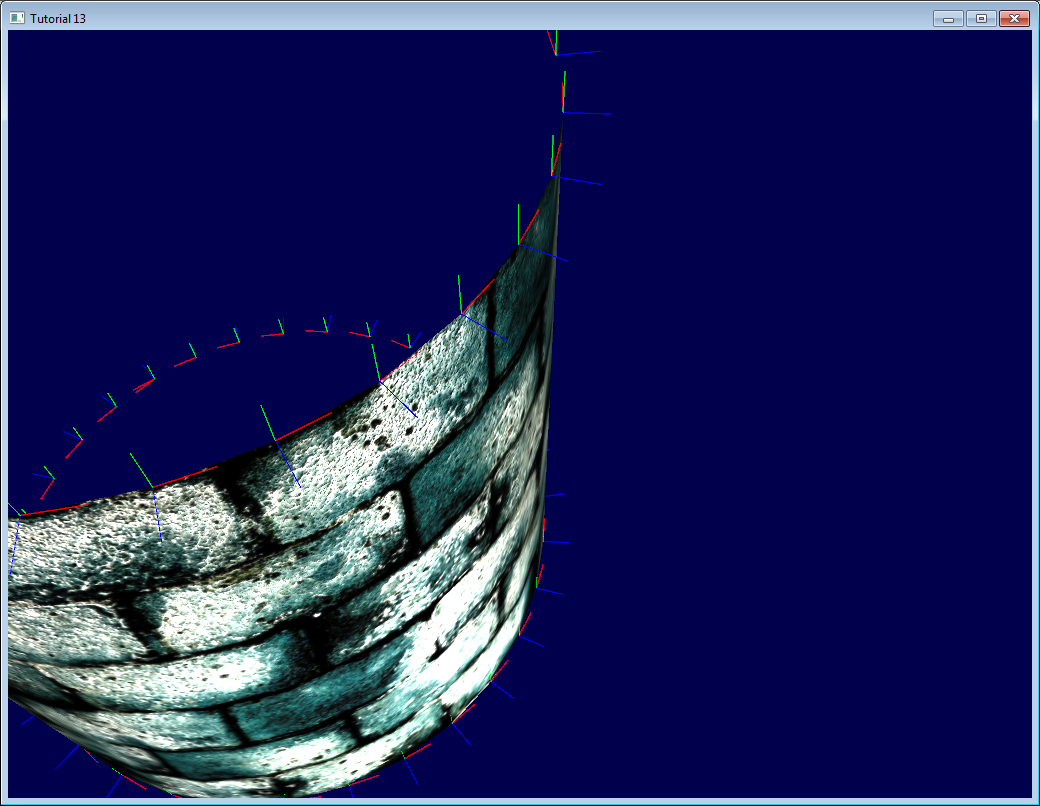
Ось приклад візуалізації нашого дотичного простору за допомогою ліній, що намальовані в цьому режимі.
Для цього Вам потрібно буде відмовитись від core профілю 3.3 :
glfwOpenWindowHint(GLFW_OPENGL_PROFILE, GLFW_OPENGL_COMPAT_PROFILE);
далі передамо наші матриці до OpengGl в старий спосіб (Ви можете написати інший шейдер, але це значно простіше зробити в цей спосіб, Ви все одно «хачите»):
glMatrixMode(GL_PROJECTION);
glLoadMatrixf((const GLfloat*)&ProjectionMatrix[0]);
glMatrixMode(GL_MODELVIEW);
glm::mat4 MV = ViewMatrix * ModelMatrix;
glLoadMatrixf((const GLfloat*)&MV[0]);
Заборонимо шейдери :
glUseProgram(0);
І намалюємо Ваші лінії (в данному випадку, нормалі, які були нормалізовані, помножені на 0.1 і прикладені до правильних вершин):
glColor3f(0,0,1);
glBegin(GL_LINES);
for (int i=0; i<indices.size(); i++){
glm::vec3 p = indexed_vertices[indices[i]];
glVertex3fv(&p.x);
glm::vec3 o = glm::normalize(indexed_normals[indices[i]]);
p+=o*0.1f;
glVertex3fv(&p.x);
}
glEnd();
Запам’ятайте: ніколи не використовуйте режим immediate в реальному коді! Тільки для налагодження! І не забувайте заново дозволити core профайл (режим). Це допоможе переконатись, що Ви більше не використовуєте старих речей.
Налагождення з кольорами
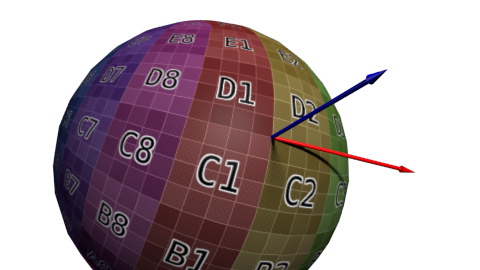
Іноді при налагодженні буває корисно візуалізувати значення вектору. Найпростіший спосіб зробити це - записати це значення в буфер кадру замість справжнього кольору. Наприклад, давайте візуалізуємо LightDirection_tangentspace:
color.xyz = LightDirection_tangentspace;
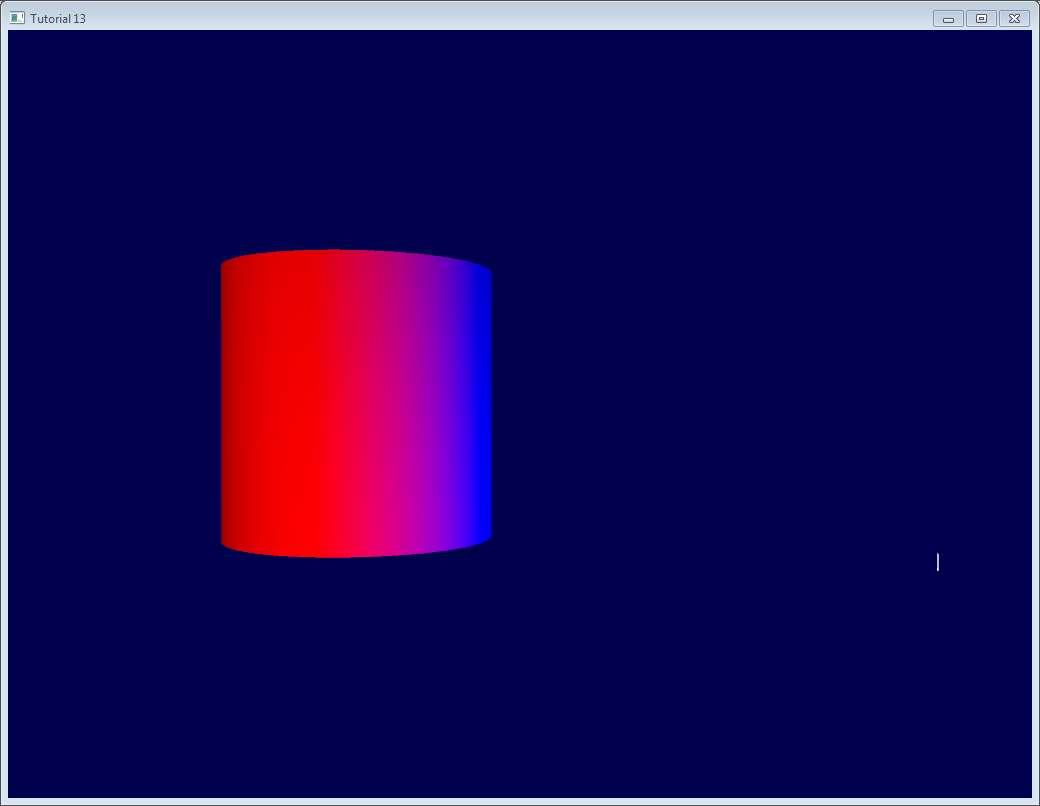
Це означає:
- В правій частині циліндра, світло (яке позначено маленькою біло лінією) направлено вгору (в дотичному просторі). Іншими словами, світло направлено в напрямку нормалі трикутника.
- В середній частині циліндра світло направлене в напрямку дотичної (протилежно напрямку осі X).
Декілька порад:
- Залежно від того, що Ви хочете візуалізувати, Ви напевне захочете нормалізувати це.
- Якщо ви не можете надати сенсу тому, що Ви бачите, візуалізуйте кожну компоненту окремо, занулючи інші кольорові складові (наприклад зелену та синю).
- Уникайте альфа каналу, це може бути сильно складно :)
- Якщо Ви хочете візуалізувати негативні значення, Ви можете використати цей самий трюк, що наші нормалі використовують - візуалізуйте ‘(v+1.0)/2.0’. В цьому випадку чорний буде значити -1, повний колір (білий) це будет +1. Хоча це все ще важко зрозуміти, що Ви бачите.
«Налагодження з іменами змінних»
Як вже зазначалось раніше, дуже важливо точно знати, в якому саме просторі знаходятся Ваші вектори. Не беріть скалярний добуток в просторі камери та векторний в просторі моделі.
Додайте суффікси з назвою простору до до імен векторів (наприклад ..._modelspace) і це допоможе виявити проблеми дуже легко.
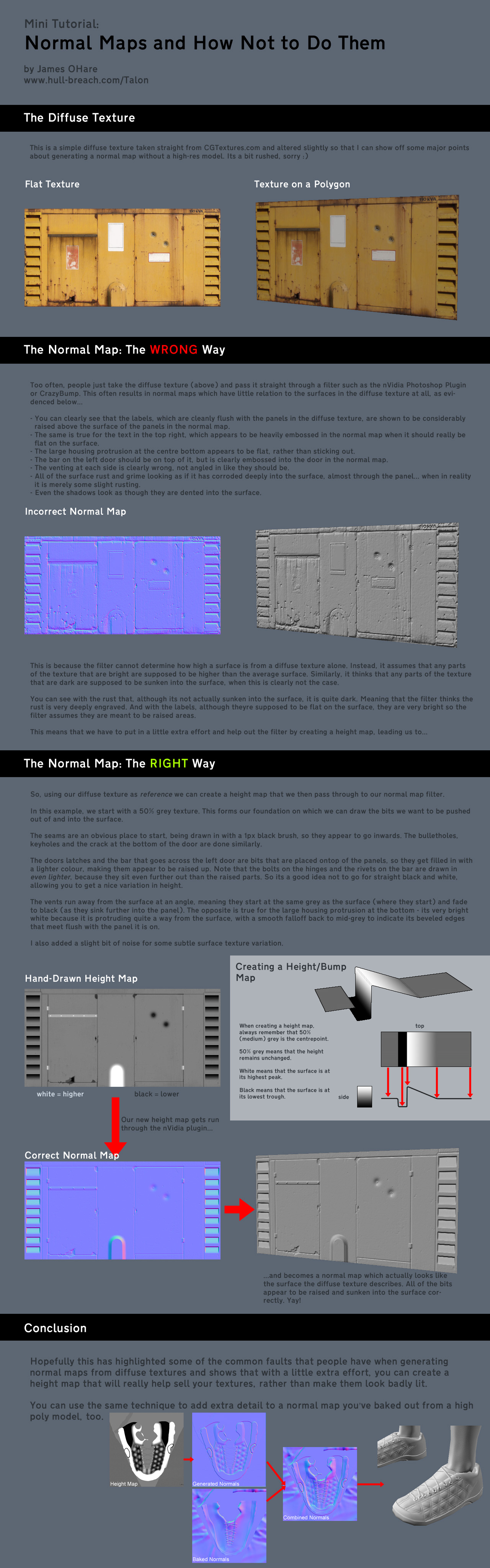
Як створити карту нормалей
Створено James O’Hare. Натисніть для збільшення.
Вправи
- Нормалізуйте вектори в indexVBO_TBN перед тим як додавати і подивіться, що вийде.
- Візуалізуйте інші вектори (наприклад
EyeDirection_tangentspace) в режимі кольорів і спробуйте знайти пояснення тому що Ви бачите.
Інструменти та посилання
- Crazybump , чудовий інструмент для створення карти нормалей. Не безкоштовний.
- Плагін для photoshop від Nvidia. Безкоштовний, проте photoshop ні…
- Створіть свої карти нормалей з декількох фотографій
- Створіть свої карти нормалей з однієї фотографії
- Більше інформації про транспонування матриць