チュートリアル17:回転
このチュートリアルではすこしOpenGLの領域を外れたことを説明します。しかしとても一般的な問題です。どうやって回転を表現するか?です。
チュートリアル3行列では特定の軸周りで点を回転させる行列を学びました。行列は頂点を変換するには良い方法ですが、行列を扱うのは難しいです。例えば、最終的な行列から回転軸を得るのはとてもトリッキーです。
回転を表す一般的な二つの方法を紹介します。オイラー角とクォータニオンです。最も重要なことは、なぜクォータニオンを使うべきかという理由を説明するところです。
序文:回転と方向
回転に関する記事を読んでいる間、きっと語彙によって混乱が生じるでしょう。このチュートリアルでは次のようなものがあります。
- 方向は状態です。”オブジェクトの方向は…”
- 回転は操作です。”オブジェクトに回転を適用する。”
これはつまり 回転を適用 すれば 方向が変わる ということです。同じようなツールとして表現できるがゆえに混乱を招きます。それでは説明をしていきます。
オイラー角
オイラー角は回転を考える上で最も簡単な方法です。基本的にX、Y、Z軸周りでの3つの回転を格納するだけです。理解しやすいシンプルな概念です。それを格納するためにvec3を使います。
vec3 EulerAngles( RotationAroundXInRadians, RotationAroundYInRadians, RotationAroundZInRadians);
これらの3つの回転は連続的に実行されます。通常はY軸、Z軸、X軸の順番です。(ただし絶対ではありません。)異なる順番では異なる結果となります。
オイラー角のシンプルな使用方法の一つにキャラクターの方向をセットすることがあります。通常キャラクターはX軸やZ軸で回転せず、垂直軸だけで回転します。それゆえ、3つの異なる方向よりも、書くのも、理解するのも、軸を維持するのも簡単な方法となります。
他のオイラー角の使用方法にFPSカメラがあります。Y軸とX軸での角度のみを扱います。common/controls.cppを例として見てください。
しかし、より複雑になると、オイラー角でうまくやるには大変です。 例えば。
- 二つの方向をスムーズに補間するのは大変です。単純にXとYとZの角度を補間してもひどい結果にしかなりません。
- いくつかの回転を適用することは複雑で不正確なものです。最終的な回転行列を計算するには、この行列のオイラー角がどうなるかを考えなければなりません。
- 良く知られた問題として、ジンバルロックがあります。これは時々回転をブロックしたり、モデルを上下逆さまにフリップするというような特性があります。
- 異なる角度が同じ結果を表します。(例えば-180度と180度です。)
- 上で挙げたように混乱を招きます。例えば正しい順番はYZXであるとか。しかしもし異なる順番のライブラリを使うと問題が生じます。
- 複雑な操作もあります。例えばある軸でのN度の回転とかです。
クォータニオンはこれらの問題を解決する回転を表現するためのツールです。
クォータニオン
クォータニオンは4つの数字[x y z w]のセットで、次のように回転を表します。
// RotationAngleはラジアンで表します。
x = RotationAxis.x * sin(RotationAngle / 2)
y = RotationAxis.y * sin(RotationAngle / 2)
z = RotationAxis.z * sin(RotationAngle / 2)
w = cos(RotationAngle / 2)
RotationAxisは名前が示すとおり、回転させたい軸を表します。
RotationAngleはこの軸周りでの回転角度を示します。
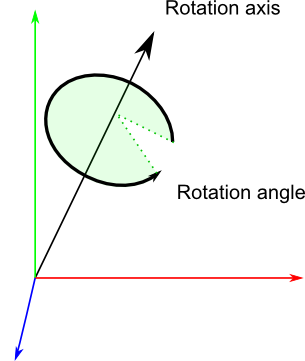
だからクォータニオンには 回転軸 と 回転角度 が必要となり、組み合わせることで回転を簡単にしています。
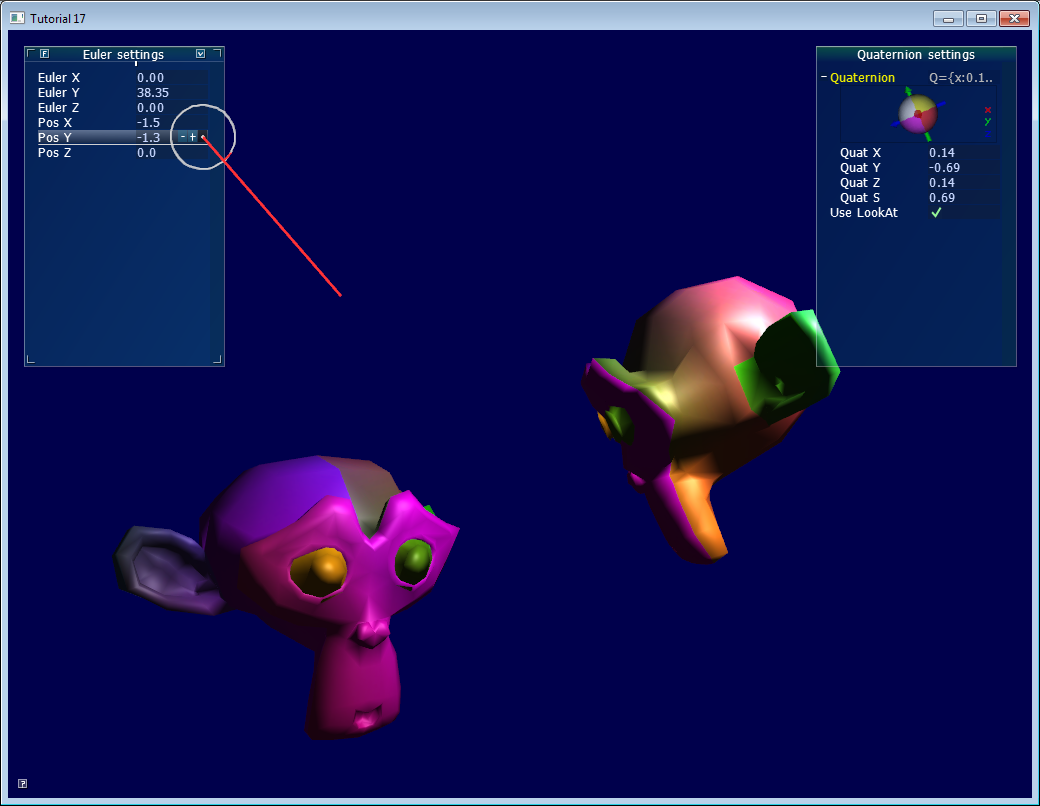
クォータニオンを読みこみ
フォーマットはオイラー角ほど直感的ではありませんが、解読は可能です。xyz要素はおおむね回転軸で、wは回転角のacosを2で割ったものを表します。例えばデバッガで次のような値を見たとしましょう。[ 0.7 0 0 0.7 ]、x=0.7はyとzより大きく、おおむねX軸周りで回転すると理解できるでしょう。そして2*acos(0.7) = 1.59ラジアン、つまりは90度の回転角で。
同様に[0 0 0 1] (w=1)はangle = 2acos(1) = 0ラジアンを意味し、これは *単位クォータニオン を意味し、何の回転も行いません。
基本的な操作
クォータニオンの背景にある数学を知ることにあまり意味はありません。表現はあまり直感的ではないので数学を実行してくれるようなユーティリティ関数にのみ頼ることになるでしょう。もし興味があれば Useful Tools & Linksにある数学本を読んでみてください。
どのようにC++でクォータニオンを作るか?
// #include <glm/gtc/quaternion.hpp>と<glm/gtx/quaternion.hpp>を忘れないで
// 単位クォータニオンを作る(何の回転もさせない)
quat MyQuaternion;
// 4要素の直接的な記述
// これを直接使うことはないでしょう。
MyQuaternion = quat(w,x,y,z);
// オイラー角からラジアンのクォータニオンへの変換
vec3 EulerAngles(90, 45, 0);
MyQuaternion = quat(EulerAngles);
// 軸-角からの変換
// GLMでは角度は度で表すので、変換します。
MyQuaternion = gtx::quaternion::angleAxis(degrees(RotationAngle), RotationAxis);
GLSLでのクォータニオンの作りかた
できません。クォータニオンを回転行列に変換して、モデル行列で使います。頂点はいつもどおりMVP行列で回転されます。
多くの場合、GLSLでクォータニオンを使いたいでしょう。例えばGPU上でスケルタルアニメーションを実行したいときなどです。GLSLにはクォータニオンタイプはありません。しかし、vec4にひとまとめにできます。そしてシェーダ内であなた自身で数学を実行すれば良いのです。
クォータニオンの行列への変換方法
mat4 RotationMatrix = quaternion::toMat4(quaternion);
これでいつもどおりモデル行列を作れます。
mat4 RotationMatrix = quaternion::toMat4(quaternion);
...
mat4 ModelMatrix = TranslationMatrix * RotationMatrix * ScaleMatrix;
// MVP行列を作るためにモデル行列を使えます。
どちらを選ぶべきか?
オイラー角とクォータニオンの選択は難しいです。オイラー角は直感的で3Dエディタで書く場合には使うほうが良いでしょう。しかしクォータニオンはプログラマにとっては便利で、早いです。だから3Dエンジンコアではクォータニオンを使うべきです。
一般的には内部的にはクォータニオンを使い、ユーザインターフェースではオイラー角を使うべきです。
必要なもの(あるいは少なくとも簡単に)はすべて対処でき、必要とあればよりシンプルな変換であるオイラー角が使えます。(上で言ったようにカメラ、人型に適しています。)
他の資料
- Useful Tools & Links に本があります。
- Game Programming Gems 1にはクォータニオンに関する素晴らしい記事があります。きっとネットで手に入るでしょう。
- GDC presentation の回転に関する項目
- Ogre3Dの FAQ on quaternions。二つ目の部分はおおむねogre特有です。
- Ogre3DのVector3D.h and Quaternion.cpp
チートシート
二つのクォータニオンが似てるかの確認方法
内積をとればそれらのベクトルの角度を出してくれます。もし値が1ならば、同じ方向を向いています。
クォータニオンでもまったく同じです。
float matching = quaternion::dot(q1, q2);
if ( abs(matching-1.0) < 0.001 ){
// q1とq2は同じ
}
q1とq2間の角度を知りたい場合は内積のacos()を取れば良いです。
頂点への回転の適用方法
次のようにできます。
rotated_point = orientation_quaternion * point;
しかしモデル行列で計算したい場合は、代わりに行列に変換すべきです。
回転の中心は常に原点です。他の点で回転させたい場合には次のようにします。
rotated_point = origin + (orientation_quaternion * (point-origin));
二つのクォータニオンの補間方法
これはSLERPと呼ばれています。球面線形補間とい言います。GLMではこれをミックスすることで行えます。
glm::quat interpolatedquat = quaternion::mix(quat1, quat2, 0.5f); // or whatever factor
二つの回転の計算方法
単純に二つのクォータニオンを掛け合わせるだけです。行列と同じで順番は同じです。つまり逆順です。
quat combined_rotation = second_rotation * first_rotation;
二つのベクトル間の回転の見つけ方
(言い換えれば、v2にマッチするようにv1を回転させるようなクォータニオン)
基本的な考え方は直接的です。
- ベクトル同士の角度の見つけ方:内積でコサインが得られます
- 回転角の見つけ方:二つのベクトルの外積
次のアルゴリズムがこれを行います。しかし特別なケースには対処が必要です。
quat RotationBetweenVectors(vec3 start, vec3 dest){
start = normalize(start);
dest = normalize(dest);
float cosTheta = dot(start, dest);
vec3 rotationAxis;
if (cosTheta < -1 + 0.001f){
// ベクトルが反対方向を向いている特殊なケース:
// 単位回転軸はないので、垂直なものを見つけます。
rotationAxis = cross(vec3(0.0f, 0.0f, 1.0f), start);
if (gtx::norm::length2(rotationAxis) < 0.01 ) // 残念、平行なのでもう一度!
rotationAxis = cross(vec3(1.0f, 0.0f, 0.0f), start);
rotationAxis = normalize(rotationAxis);
return gtx::quaternion::angleAxis(glm::radians(180.0f), rotationAxis);
}
rotationAxis = cross(start, dest);
float s = sqrt( (1+cosTheta)*2 );
float invs = 1 / s;
return quat(
s * 0.5f,
rotationAxis.x * invs,
rotationAxis.y * invs,
rotationAxis.z * invs
);
}
この関数はcommon/quaternion_utils.cppにあります。
gluLookAtと同じように、オブジェクトをある点の方向へ向けさせたい。
RotationBetweenVectorsを使いましょう!
// オブジェクトの前方(通常は+Z方向ですが、場合によります)と目的の方向との回転を見つけます。
quat rot1 = RotationBetweenVectors(vec3(0.0f, 0.0f, 1.0f), direction);
ここでオブジェクトをまっすぐ向かせたい場合を考えます。
// 方向と垂直するように、目的の上方向を再計算します。
// もし本当に目的の上方向に向かせたいなら、このパートはスキップできます。
vec3 right = cross(direction, desiredUp);
desiredUp = cross(right, direction);
// 最初の回転のため、上はたぶん失敗します。
//オブジェクトの上と目的の上との間の角度を見つけます。
vec3 newUp = rot1 * vec3(0.0f, 1.0f, 0.0f);
quat rot2 = RotationBetweenVectors(newUp, desiredUp);
これらをあわせます。
quat targetOrientation = rot2 * rot1; // 逆順になります。
“方向”は方向であって目標とする点ではありません。しかし次のように位置は計算できます。目標点-現在点。
一度目的の方向を得たなら、startOrientationとtargetOrientationの間の補間が欲しいと思います。
(この関数はcommon/quaternion_utils.cppにあります。)
特定の回転スピードに制限したLookAtの使い方
基本的な考え方はSLERP( = use glm::mix )と同じです。しかし回転角が目的の値より大きくならないように補間します。
float mixFactor = maxAllowedAngle / angleBetweenQuaternions;
quat result = glm::gtc::quaternion::mix(q1, q2, mixFactor);
以下に特殊なケースにも対応した完璧な実装を示します。最適化のためmix()を直接は使っていません。
quat RotateTowards(quat q1, quat q2, float maxAngle){
if( maxAngle < 0.001f ){
// No rotation allowed. Prevent dividing by 0 later.
return q1;
}
float cosTheta = dot(q1, q2);
// q1とq2は既に同じです。
// q2を返します。
if(cosTheta > 0.9999f){
return q2;
}
// 球の周りの長いパスを取るのを防ぎます。
if (cosTheta < 0){
q1 = q1*-1.0f;
cosTheta *= -1.0f;
}
float angle = acos(cosTheta);
// もし5度ずつ回転させてるときに2度しかない場合は到着させます。
if (angle < maxAngle){
return q2;
}
float fT = maxAngle / angle;
angle = maxAngle;
quat res = (sin((1.0f - fT) * angle) * q1 + sin(fT * angle) * q2) / sin(angle);
res = normalize(res);
return res;
}
これは次のように使います。
CurrentOrientation = RotateTowards(CurrentOrientation, TargetOrientation, 3.14f * deltaTime );
この関数はcommon/quaternion_utils.cppにあります。
他の方法は…
もしこれで解決しないなら、メールを送ってください、それをリストに追加します。